|
| Title: | Enhancing collision avoidance in mixed waterborne transport: Human-mimic navigation and decision-making by autonomous vessels | | | Authors: | R. Song, E. Papadimitriou, R.R. Negenborn, P.H.A.J.M. van Gelder |
| | Journal: | Ocean Engineering | | |
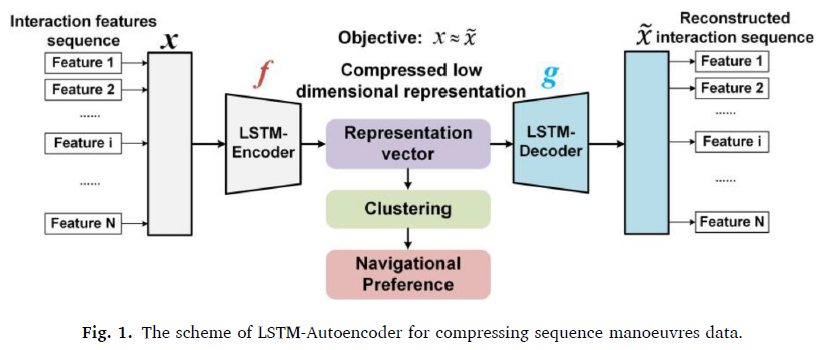
| | Abstract: | Collision avoidance in maritime navigation, particularly between autonomous and conventional vessels, involves iterative and dynamic processes. Traditional path planning models often neglect the behaviours of surrounding vessels, while path predictive models tend to ignore ship interaction features essential in collision scenarios. This study proposes a decision-making framework for collision avoidance, particularly focused on the interaction between autonomous and conventional vessels. The framework integrates a human-preference-aware navigational trajectory prediction model into the collision avoidance process, enhancing the decision-making capabilities in dynamic and interactive environments. We first model human-controlled ship navigational preferences using a Long Short-Term Memory (LSTM) autoencoder combined with K-means clustering, by extracting key preferences from ship pairs identified through AIS data. These preferences, which reflect strategic trajectory adjustments in response to collision risks, are then incorporated into trajectory prediction using a Multi-Task Learning Sequence-to-Sequence (seq2seq) attention LSTM model. The predicted trajectories provide a basis for the decision-making framework, including a local path planner and a trajectory tracking controller, designed to dynamically refine and follow the predicted paths while mitigating collision risks. The framework was validated using AIS data from the port of Rotterdam, identifying four distinct navigational preferences by combining an LSTM-autoencoder and clustering techniques and demonstrating improved prediction accuracy compared to other existing models. Simulation tests demonstrate that the framework utilises the predicted trajectories to inform decision-making, ensuring accurate path tracking while dynamically addressing collision risks for autonomous ships. By providing preference-aware and adaptive reference trajectories, the framework reduces the likelihood of MASS trajectory misinterpretation by conventional ships, thereby supporting proactive collision avoidance in mixed waterborne transport environments. |
| | Reference: | Enhancing collision avoidance in mixed waterborne transport: Human-mimic navigation and decision-making by autonomous vessels. R. Song, E. Papadimitriou, R.R. Negenborn, P.H.A.J.M. van Gelder. Ocean Engineering, vol. 322, no. 120443, April 2025. Open access. | | | Download: | Open access |
|
|