|
|
|
| Main research interests: Coordination within and among transport hubs
4S Framework:
Real-time coordination of
Smart Equipment in Smart Hubs
for Smart Ports in Smart Networks
|
Anticipating the
Massive introduction of
Sensing, Computation, and
Communication Technologies
|
| |
|
|
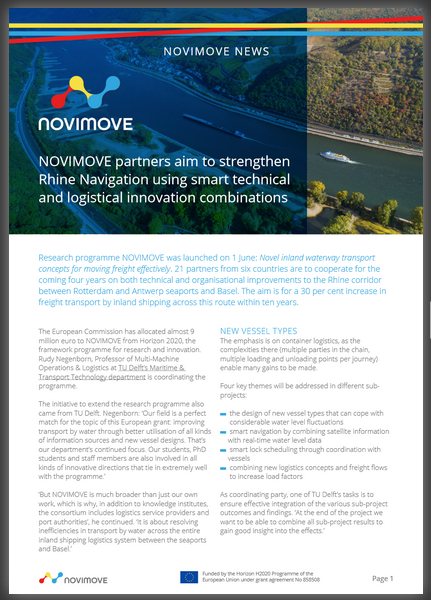
Spotlight publication
|
|
|
Prospective students Multi-Machine Engineering (MME):
Interested in becoming a multi-machine Master of Science at TU Delft?
Find out more here about our 2-year MSc program.
|
|
|
Inauguration Speech
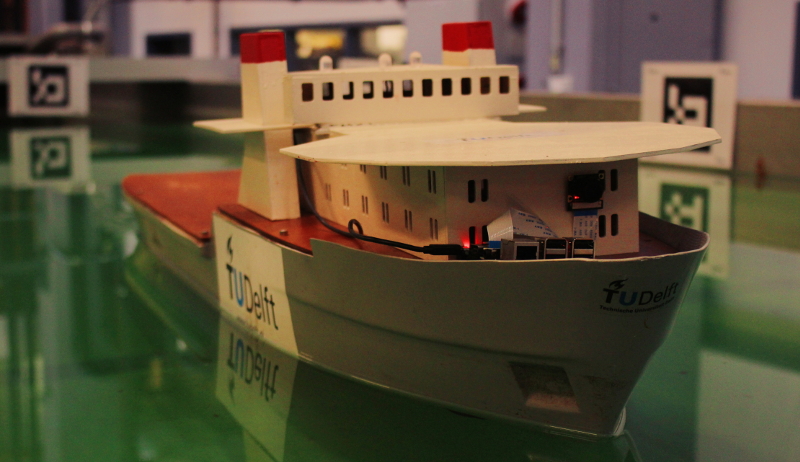
on communication, logistics, autonomous ships, and multi-machine engineering

"What if ships could talk?", or: Coordination for Real-Time Logistics
[Watch the public presentation online]
|
|
| |
|
| Infographics
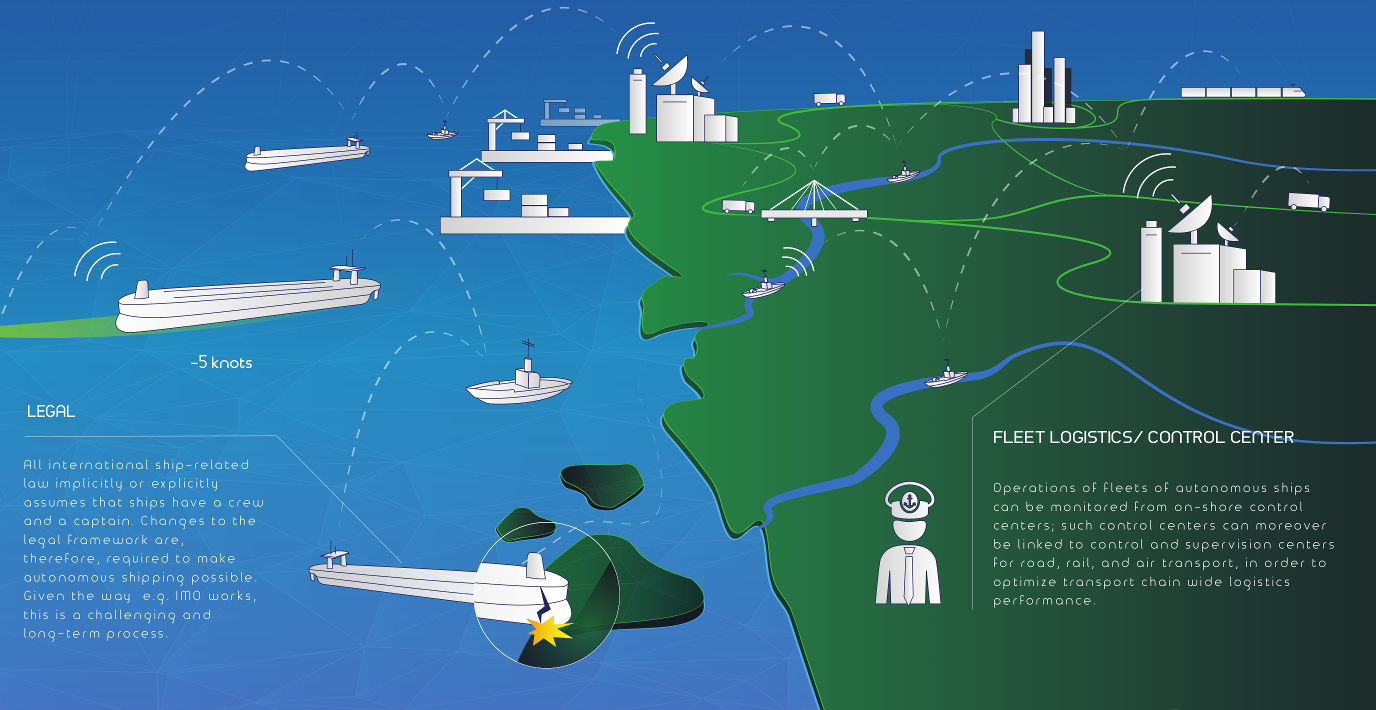
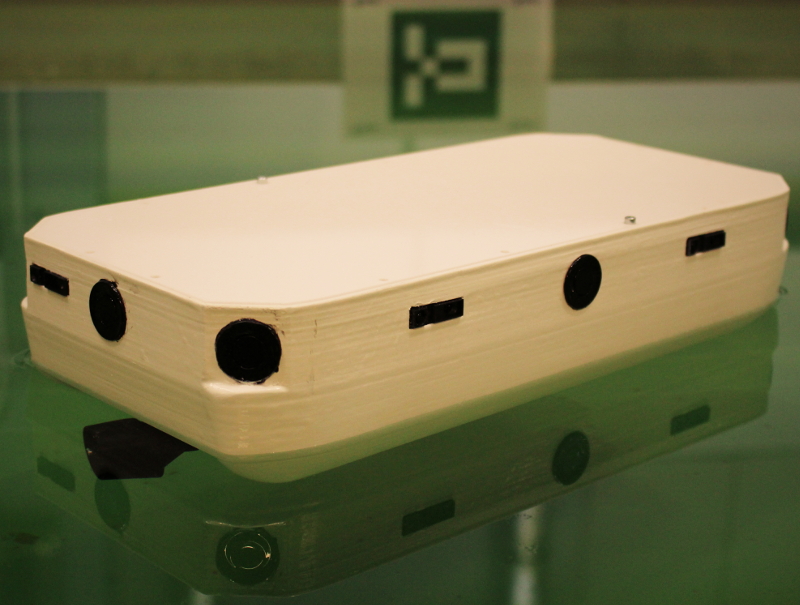
How will autonomous ships work?
|
| Books
|
|
Research in Sketches

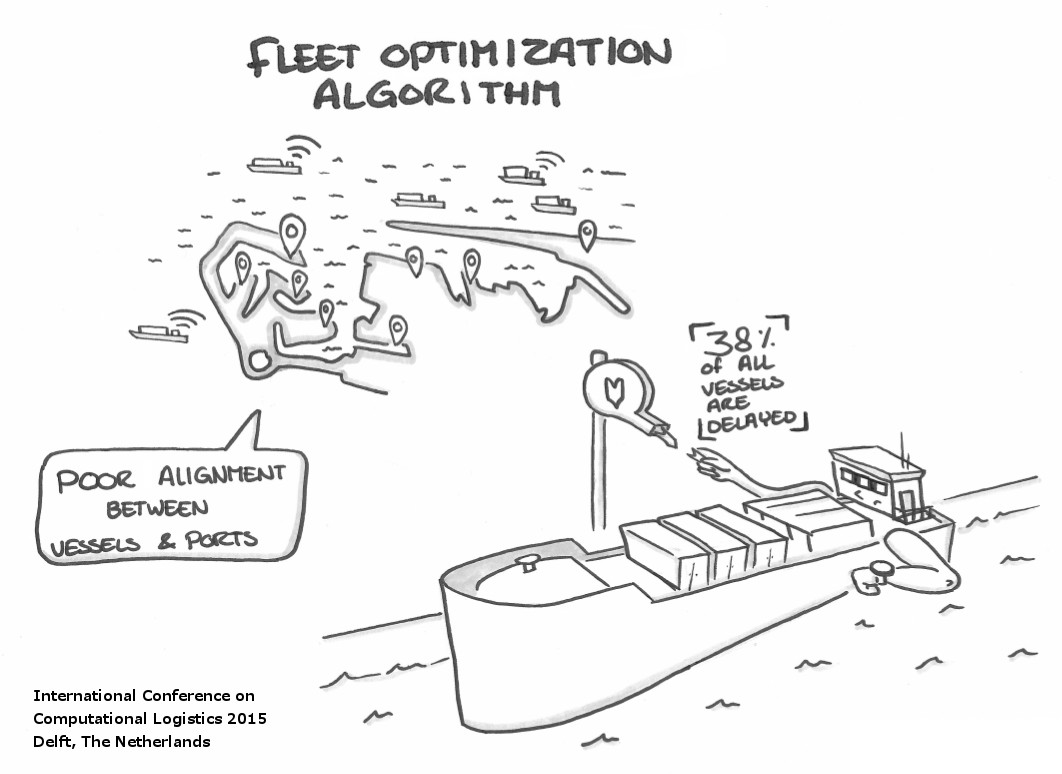
[More...]
|
|
Active topic cloud (past 3 years)
| |
Keywords
logistics,
intermodal transport,
container transport
transport over water,
control of ships
transportation networks, inter-terminal transport
water
networks
power networks,
gas networks
multi-agent
systems, model
predictive
control, hybrid
systems
reinforcement learning, Kalman filters, learning robots
The Brain of TU Delft
|
|

|
|
| |
|
|
|
|