|
| Title: | A multiple sensor fault diagnosis scheme for autonomous surface vessels | | | Authors: | A. Dhyani, R.R. Negenborn, V. Reppa |
| | Conference: | 12th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes (IFAC SAFEPROCESS 2024) | | Address: | Ferrara, Italy | | Date: | June 2024 |
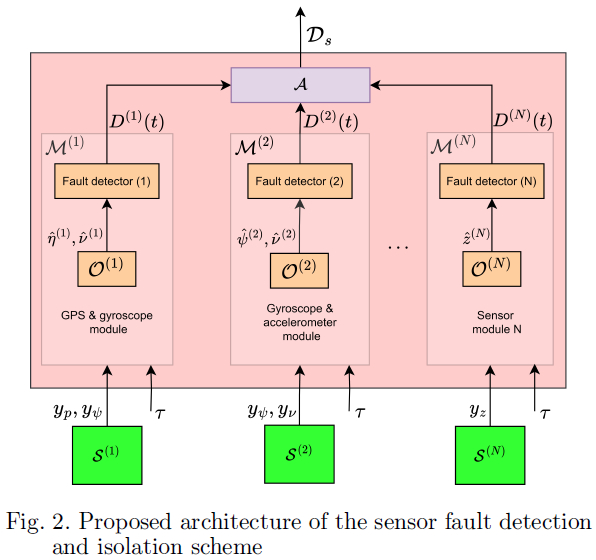
| | Abstract: | Autonomous surface vessels (ASVs) have started to operate in many safety-critical scenarios where rich sensor information is required for situational awareness, environmental perception, motion planning, collision avoidance and navigational control. A timely diagnosis of faulty onboard sensors is therefore essential for ensuring maritime safety and reliability. In this paper, a model-based fault diagnosis scheme is presented for ASVs affected by multiple sensor faults. Various monitoring modules comprising nonlinear observers are employed for the detection of faults occurring in the vessel's navigational sensors. Further, multiple fault isolation is performed based on a combinatorial decision logic, achieved by grouping the available sensors into multiple sensor sets. The efficacy of the proposed scheme is demonstrated through a simulation example of a vessel trajectory tracking scenario. |
| | Reference: | A multiple sensor fault diagnosis scheme for autonomous surface vessels. A. Dhyani, R.R. Negenborn, V. Reppa. In IFAC PapersOnLine 58(4) (IFAC SAFEPROCESS 2024), Ferrara, Italy, pp. 31-36, June 2024. | | | Request: | A
copy of this publication. |
|
|