|
| Title: | Follow-the-leader guidance, navigation and control of surface vessels: Design and experiments | | | Authors: | B. Piaggio, V. Garofano, S. Donnarumma, A. Alessandri, R.R. Negenborn, M. Martelli |
| | Journal: | IEEE Journal of Oceanic Engineering | | |
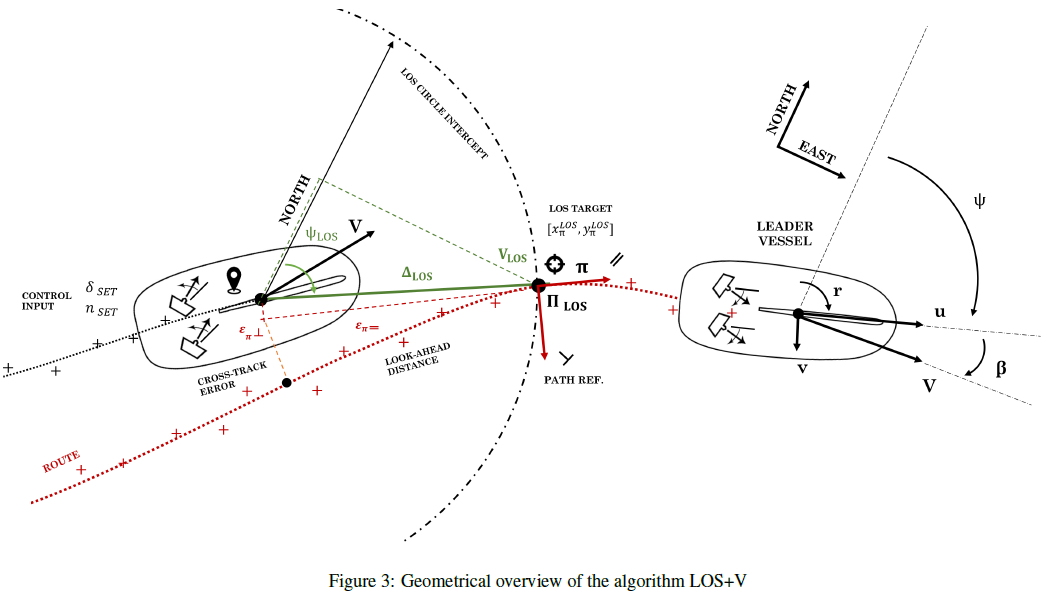
| | Abstract: | A novel follow-the-leader approach for azimuth-driven vessels is devised and experimentally tested in a model-scale outdoor scenario. The vessels are equipped with global navigation satellite and inertial navigation systems. A line-of-sight algorithm is adopted to ensure yaw-check ability, while speed regulation allows to track the velocity of the leader by keeping the follower along the path of the leader. Track generation, guidance, navigation, and control modules are designed and assembled to be executed on-board in real time. The results of an outdoor experimental campaign are illustrated to show the effectiveness of the proposed approach. |
| | Reference: | Follow-the-leader guidance, navigation and control of surface vessels: Design and experiments. B. Piaggio, V. Garofano, S. Donnarumma, A. Alessandri, R.R. Negenborn, M. Martelli. IEEE Journal of Oceanic Engineering, vol. 48, no. 4, pp. 997-1008, October 2023. | | | Request: | A
copy of this publication. |
|
|