|
| Title: | A ship collision avoidance system for human-machine cooperation during collision avoidance | | | Authors: | Y. Huang, L. Chen, R.R. Negenborn, P.H.A.J.M. van Gelder |
| | Journal: | Ocean Engineering | | |
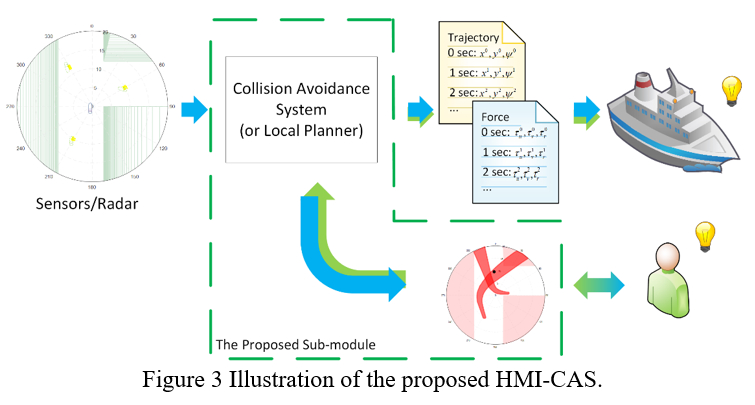
| | Abstract: | Maritime Autonomous Surface Ships (MASS) attract increasing attention in recent years. Researchers aim at developing fully autonomous systems that replace the role of human operators. Studies either focus on supporting conflict/collision detection (for manned ships) or solving conflict automatically (for unmanned ships). The cooperation between human and machine has been less focused on in existing studies. However, this type of cooperation is essential both in practice and in the future: firstly, demands on navigational assistance are still strong for supporting navigators in manned ships; secondly, MASS with different autonomy levels require increasing cooperation between human operators and machines, e.g. monitoring automation, remotely controlling the ship, etc.; thirdly, the intelligence of human and the machines is highly complementary. Moreover, fully autonomous ships cannot replace all the manual ships overnight. Therefore, the future waterborne transport system will be a system in which both human-operated vessels and autonomous vessels exist. In this article, we firstly provide an overview of existing modes of human-machine interaction (HMI) during ship collision avoidance. Then, we propose a framework of HMI oriented Collision Avoidance System (HMI-CAS) that facilitates automatic collision avoidance and enables the human operators to take over the control of the MASS safely. Moreover, the proposed framework acknowledges the under-actuated feature of ships. Simulations are carried out to demonstrate the proposed HMI-CAS. The results show that the proposed HMI-CAS can not only control the under-actuated MASS to avoid collision automatically but also share the decision-making with human operators and support the operators to control the MASS.
|
| | Reference: | A ship collision avoidance system for human-machine cooperation during collision avoidance. Y. Huang, L. Chen, R.R. Negenborn, P.H.A.J.M. van Gelder. Ocean Engineering, vol. 217, no. 107913, 2020. Open access. | | | Download: | open access |
|
|