|
| Title: | Cooperative control of autonomous tugs
for ship towing in ports | | | Authors: | Z. Du, V. Reppa, R.R. Negenborn |
| | Conference: | 21st IFAC World Congress (IFAC2020) | | Address: | Berlin, Germany | | Date: | July 2020 |
| | Abstract: | Autonomous surface vehicles (ASVs) have been developed for decades and most
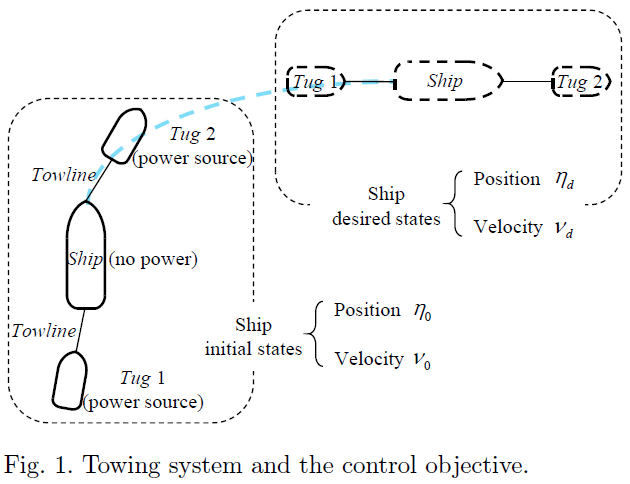
of the applications are in the military and scientific domain. In recent years, their commercial potential uses are attracting the attention of many companies. One of the promising subjects is to develop the autonomous tugs for ship berthing. However, the related research is either far away from maritime practice or lacks the control subjects to regulate the manipulated object precisely for adapting to the complex port environment. This paper focuses on the cooperative control of autonomous tugs for ship towing in berthing scenario. We propose a multi-layer optimal control strategy for the towing system to guarantee the ship reaches a desired position with a desired heading and velocity. In the higher layer supervisory control, an optimal control method is used to allocate the towing forces and determine the towing angles. With the help of these results and the geometry relationships, the reference trajectories of the two autonomous tugs can be calculated online. Based on the reference trajectories, the trajectory tracking, which is in the lower layer, is addressed. Simulation results indicate that two autonomous tugs can cooperatively tow the unpowered ship to a desired position with a desired heading and velocity. |
| | Reference: | Cooperative control of autonomous tugs
for ship towing in ports. Z. Du, V. Reppa, R.R. Negenborn. In Proceedings of the 21st IFAC World Congress (IFAC2020), Berlin, Germany, pp. 14671-14676, July 2020. | | | Request: | A
copy of this publication. |
|
|