|
| Title: | Adaptive control for a class of partially
unknown non-Affine systems: Applied to
autonomous waterborne vehicles | | | Authors: | A. Haseltalab, R.R. Negenborn, G. Lodewijks |
| | Conference: | IFAC 2017 World Congress (IFAC 2017 WC) | | Address: | Toulouse, France | | Date: | July 2017 |
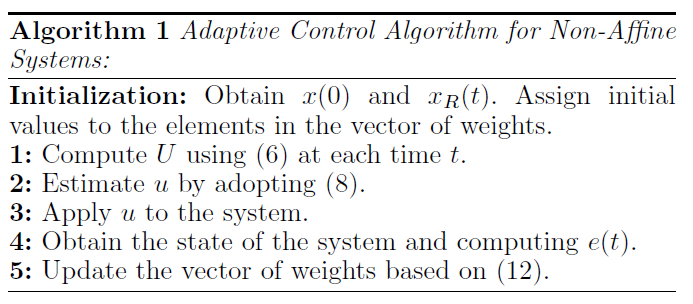
| | Abstract: | In this paper, a neural network-based adaptive control algorithm is proposed for a class of non-affine systems where the nonlinear influence of the system input on the states is unknown. The algorithm transforms the problem of controlling non-affine systems to control of nonlinear affine systems and then, by approximating the inverse of the input function, calculates feasible control input. Lyapunov technique, Uniform Ultimate Boundedness and Matrix Singular Values are used for stability analysis and design of the controller. In order to investigate the performance of the algorithm, it is applied to an autonomous vessel where the dynamics of the propeller is unknown. |
| | Reference: | Adaptive control for a class of partially
unknown non-Affine systems: Applied to
autonomous waterborne vehicles. A. Haseltalab, R.R. Negenborn, G. Lodewijks. In Proceedings of the 20th IFAC World Congress (IFAC 2017 WC), Toulouse, France, pp. 4336-4341, July 2017. | | | Request: | A
copy of this publication. |
|
|